micro-bot
Hardware & Firmware for BBC Micro:bit sumo bot
Buy Parts
| References | Qty | Description | Manufacturer | MPN |
|---|---|---|---|---|
| C1 | 1 | C1 100uF ALUMINUM_WURTH_100UF_865080243007 TimeExpander2 (24.257 13.2715) R270 | LCSC | C2763765 |
| R9, R10, R11, R12,R13 | 5 | R9 10k RES_0402 TimeExpander2 (53.1495 57.3405) R90 | LCSC | C2763765 |
| S1 | 1 | S1 POWER SWITCH_JS202011SCQN TimeExpander2 (10.541 18.415) R90 | LCSC | C221666 |
| U1 | 1 | U1 L293DD SO-20 TimeExpander2 (62.357 38.735) R90 | LCSC | C434591 |
| U3 | 1 | U3 TXB0106PWRPW16-L PW16-L TimeExpander2 (82.931 39.751) R90 | LCSC | C38253 |
| U4 | 1 | U4 BBC Micro:bit CYCLONE_MICROBIT_VERTICAL TimeExpander2 (50.165 64.9605) R270 | ||
| U5, U6, U7, | 3 | U5 VL53LOX - Right VL53LOX TimeExpander2 (92.202 33.02) R180 | LCSC | C2935930 |
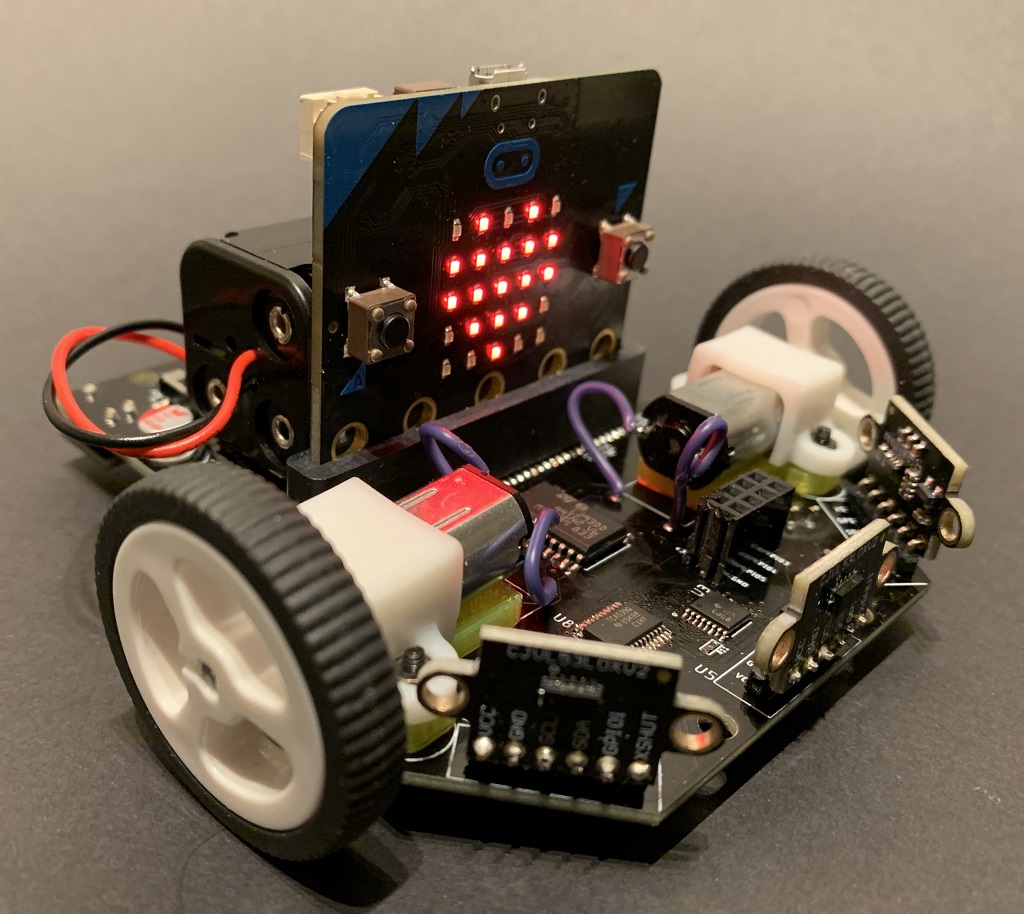
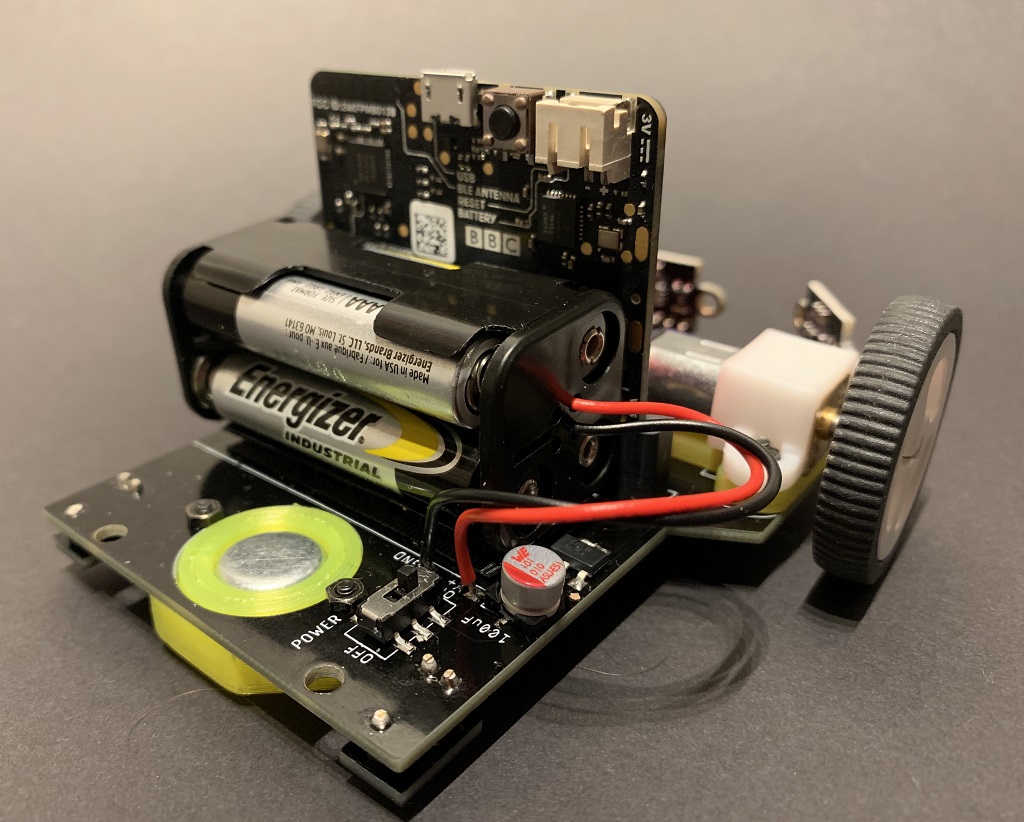
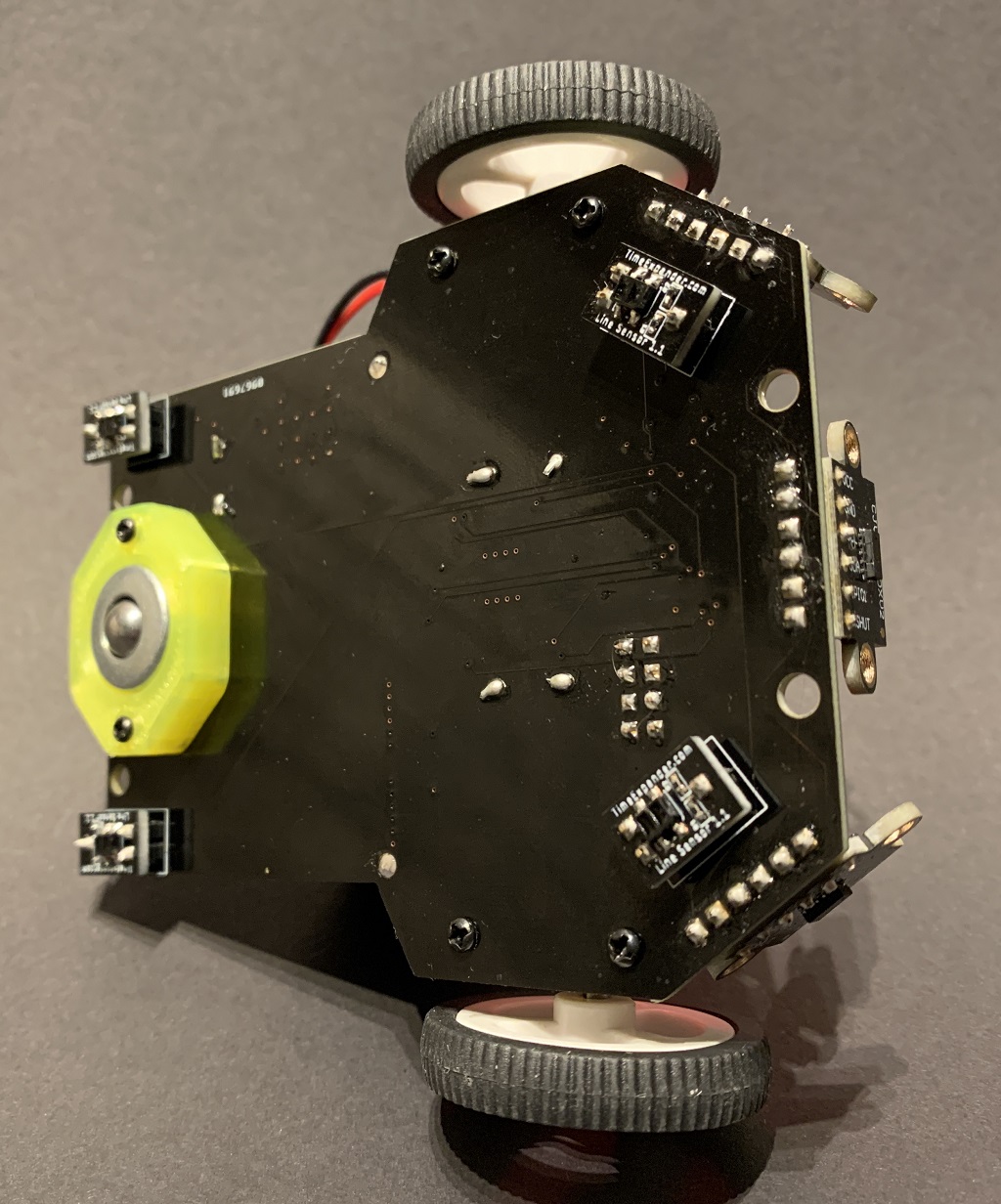
Micro:bit sumo robot
Firmware and hardware design files for the TimeExpander.com Micro:bit based robot
The bot features two motor bridges, 3 x time of flight sensors, 4 x reflective object sensors and a GPIO Expander.
Toolchain for building the firmware is the mBed online compiler.
You can watch one of the demo state machines in action here: https://youtu.be/_6B225iNg58
V3
There is an untested v3 in the Hardware folder. See v3 Readme
V2
This is the latest tested version.
v2 Bill of materials
- 1 x Main PCB (https://github.com/hansj66/micro-bot/blob/master/Hardware/minisumo_v2.brd)
- 4 x line sensor PCBs (https://github.com/hansj66/micro-bot/blob/master/Hardware/minisumo_sensor.brd)
- 2 x Wheels (AliExpress)
- 2 x N20 motors (AliExpress)
- 2 x N20 motor bracket assembly (AliExpress)
- 3 x VL53L0X time of flight sensors on a carrier PCB (AliExpress)
- 1 x TCA9539 IO expander (Digikey)
- 1 x TXB0106PWR Bi-directional level translator (Digikey)
- 4 x QRE1113GR Reflective optical sensors (Digikey)
- 1 x 100uF aluminium capacitor
- 1 x 2x5 pin 2.54mm female header (Digikey)
- 1 x battery pack for 4x AAA (Digikey)
- 1 x JS202011SCQN slide switch (Digikey)
- 1 x SOT223 LM1117 3.3V regulator (Digikey)
- 1 x Mini caster assembly (AliExpress + 3D printed bracket)
- 2 x 3D printed spacers (between motors and PCB)
- 1 x 12 pin male breakaway header (Digikey)
- 3 x 6 pin RA breakaway header (Digikey)
- 1 x hook and loop tape (for attaching battery pack)
- 2 x 100nf capacitors (motor noise suppression)